A Low-cost Pin-on-disk Tribometer
Allows measurements of friction and wear under variable load and speed
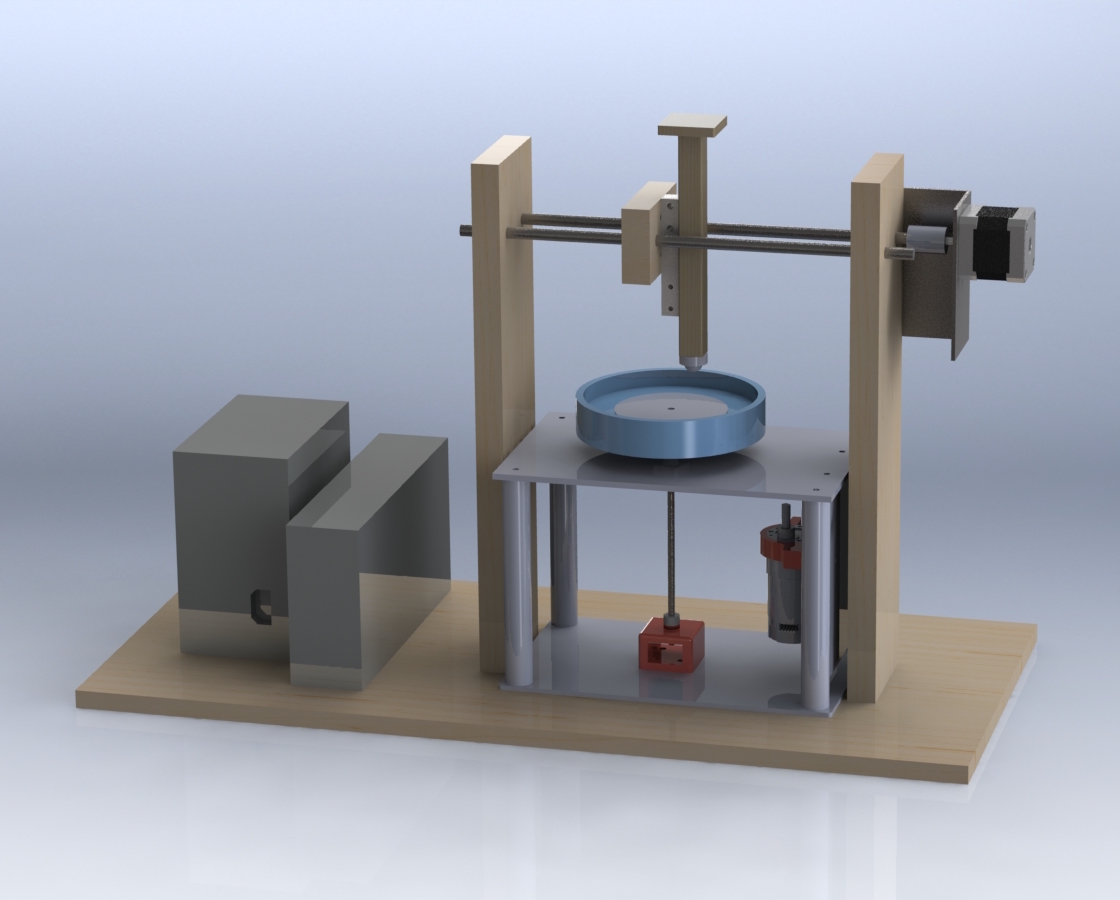
Accurate Lateral Force Measurements
The load cell used enables force measurements within 2% error
Variable Speed
The rotation motor is PID close-loop controlled, ranging from 0-200 RPM
Lubricant-enabled
The testing sample can be submerged with lubricants
Precise Positioning
A motorized leadscrew design enables positioning of the pin with a 0.5 mm resolution.
Arduino Microcontroller
Users can easilly add or modify sensors onboard.
Python GUI
The Arduino onboard can be controlled via serial communication using a Python GUI application.
Team Members: Bohan Gao 19' (Force Sensing), Jacob Garcia 19' (Pin Positioning), Jingnan Shi 19' (Disk Control), Chris Strong 19' (Force Actuation)